


Le connecteur 8P8C (8 positions et 8 contacts électriques) est utilisé couramment pour les connexions Ethernet entre autres. Il est appelé improprement, mais couramment RJ45. La référence « RJ » vient de l'anglais Registered Jack (prise jack enregistrée) qui est une partie du Code des règlements fédéraux (Code of Federal Regulations) aux États-Unis. Le « 45 » correspond au numéro du standard « RJ ». Comme l'indique son nom 8P8C, il comporte huit broches de connexions électriques. Un connecteur RJ45 est une interface physiquesouvent utilisée pour terminer les câbles de type paire torsadée. Il est souvent utilisé avec des standards comme le TIA/EIA-568-B qui décrit le brochage de terminaison du câblage.
![]()

Read More »

Lors d'un câblage informatique en 10/100 Mbit/s, seules les quatre broches 1-2 et 3-6 sont utilisées pour transmettre les informations. Lors d'un câblage informatique en1 000 Mbit/s (1 Gbit/s), les 8 broches sont utilisées. Lorsqu'on branche un poste de travail dans un concentrateur (hub) ou un commutateur (switch), un câble droit doit être utilisé. Lorsqu'on doit brancher deux postes de travail ensemble, un câble croisé doit être utilisé. Dans le câble croisé, les paires utiles sont inversées, c'est-à-dire que la paire de transmission d'un côté est connectée aux broches de réception de l'autre côté. La règle générale est la suivante : pour deux périphériques travaillant au niveau de la couche 2 (MAC) du modèle OSI comme un Hub Ethernet ou un switch sans fonction de routage, ou deux périphériques de la couche 3 (IP) comme un PC ou un routeur, on utilise un câble croisé. Dès que l'on change de couche entre deux équipements, on peut alors utiliser un câble droit (PC à Switch, Routeur à Switch, Hub à PC, etc.).
La plupart des équipements modernes de réseau sont cependant capables de faire du MDI/MDI-X, c'est-à-dire du (dé)croisement automatique en fonction du type de câble utilisé, des adaptateurs réseaux et de la situation présente. Ce (dé)croisement se fait de manière logicielle au niveau d'un des deux adaptateurs (ou au sein du système d'exploitation) après que ceux-ci se sont mis d'accord sur l'adaptateur à inverser.
Read More »
Dans cette leçon nous allons apprendre à utiliser les boutons avec les entées numériques pour commander une LED.
DEMO :
![]()
Besoins :
* une LED :

* une Resistance 270Ohm

* un Bouton poussoir :




* un Bouton poussoir :

et biensûr l'arduino .
Schéma :

Alors , lors d’appuyé sur le bouton A la led s'allume .
lors d'appuyé sur le bouton B la led s’atteint .
lors d'appuyé sur le bouton B la led s’atteint .
Code Arduino :
Comme d'habitude il faut écrire ce code dans l'ide arduino puis l'uploader dans la carte .
/* déclaration des pins */
int ledPin = 5;
int buttonApin = 9;
int buttonBpin = 8;
byte leds = 0;
/* configuration des pins */
void setup()
{
pinMode(ledPin, OUTPUT);
pinMode(buttonApin, INPUT_PULLUP);
pinMode(buttonBpin, INPUT_PULLUP);
}
void loop()
{
if (digitalRead(buttonApin) == LOW)
{
digitalWrite(ledPin, HIGH);
}
if (digitalRead(buttonBpin) == LOW)
{
digitalWrite(ledPin, LOW);
}
}
DEMO :
à vous de testez :p
Read More »
Un registre à décalage est un registre, c'est-à-dire un ensemble de bascules synchrones, dont les bascules sont reliées une à une, à l'exception de deux bascules qui ne sont pas forcément reliées. À chaque cycle d'horloge, le nombre représenté par ces bascules est mis à jour.
![]()


Read More »

Différents types de registre à décalage existent :
- SISO (Serial In - Serial Out) : à chaque cycle d'horloge, on ne peut écrire que dans une bascule (lorsque deux bascules ne sont pas reliées entre elles, c'est celle dont l'entrée n'est pas reliée à une autre bascule), et on ne peut lire qu'une autre (lorsque deux bascules ne sont pas reliées entre elles, c'est celle dont la sortie n'est pas reliée à une autre bascule)
- SIPO (Serial In - Parallel Out) : à chaque cycle d'horloge, on ne peut écrire que dans une bascule (lorsque deux bascules ne sont pas reliées entre elles, c'est celle dont l'entrée n'est pas reliée à une autre bascule), mais on peut lire les valeurs de toutes les bascules
- PISO (Parallel In - Serial Out) : à chaque cycle d'horloge, on peut forcer la valeur de toutes les bascules, mais on ne peut en lire qu'une (lorsque deux bascules ne sont pas reliées entre elles, c'est celle dont la sortie n'est pas reliée à une autre bascule)
- PIPO (Parallel In - Parallel Out) : à chaque cycle d'horloge, on peut forcer la valeur de toutes les bascules, et on peut toutes les lire
Le registre à décalage réversible est un registre à décalage où le décalage s'effectue vers la droite ou vers la gauche en fonction du niveau logique appliqué à l'entrée "Sens de décalage".

Read More »
Matrice de LED de 8 lignes et 8 colonnes
Ce montage permettra de voir comment construire un afficheur a LED de huit rangées et de huit colonnes. Le circuit comprend une mémoire externe EEPROM 24C256 dans lequel on peut stocker des blocs de pixels qui sont ensuite représentés par l’écran
Le microcontrôleur utilisé est un PIC16F628 avec 2 kilo-octets de mémoire flash. Toutefois, vous pouvez utiliser un PIC16F627A ou un PIC16F648A.
Ce microcontrôleur peut sembler faible, mais il est plus que suffisantes pour gérer les composants et les fonctions du projet.
Ce microcontrôleur peut sembler faible, mais il est plus que suffisantes pour gérer les composants et les fonctions du projet.
Les colonnes de la matrice sont sélectionnées par un registre à décalage de 8 bits de long, mis en œuvre à l’aide d’un 74HC164N.

Schéma

Liste des composants
* 1 : microcontrôleur PIC16F628, avec support
* 1 : 24C256 EEPROM, avec support
* 1 : circuit intégré 74HC164N , avecsupport.
* 1 : régulateur de tension LM7805
* 4 : condensateurs 0,1 uF céramiques.
* 2 : condensateurs 22 pF céramiques.
* 1 : Quartz 4 MHz Xtal
* 1 : condensateur électrolytique 220uF/16V.
* 1 : diode 1N4007
* 8 : transistors 2N3906.
* 8 : résistances 100 Ohm .
* 1 : résistance de 10K.
* 8 : résistances 1.5K.
* 1 : bornier à deux vis.
* 64 : LED rouge de 5 mm.
* 1 : 24C256 EEPROM, avec support
* 1 : circuit intégré 74HC164N , avecsupport.
* 1 : régulateur de tension LM7805
* 4 : condensateurs 0,1 uF céramiques.
* 2 : condensateurs 22 pF céramiques.
* 1 : Quartz 4 MHz Xtal
* 1 : condensateur électrolytique 220uF/16V.
* 1 : diode 1N4007
* 8 : transistors 2N3906.
* 8 : résistances 100 Ohm .
* 1 : résistance de 10K.
* 8 : résistances 1.5K.
* 1 : bornier à deux vis.
* 64 : LED rouge de 5 mm.
Read More »
Un amplificateur audio de 1 watt simples
![]()



Read More »
La maquette de soudure, il est facile d'expérimenter avec des ajouts au circuit radio. Dans cette section, nous allons construire un simple amplificateur, de sorte que toute une chambre peut entendre la radio via un haut-parleur. Notre amplificateur ne sera pas l'oreille bouleversante, puisque nous avons fait aussi simple que nous pouvons pour construire, mais la sortie est assez impressionnant pour un seul transistor.

Avec l'amplificateur, notre radio ressemble à la photo ci-dessus.
Ci-dessous est un gros plan de la section de l'amplificateur:

L'amplificateur a besoin de ces pièces:
Un transistor Darlington MPSW45A
Telle est la principale partie de travail de l'amplificateur.
Un petit haut-parleur
Deux 100.000 résistances ohms
Cette résistance aura quatre bandes de couleur sur elle. Les couleurs seront brun, noir, jaune et or.
Une résistance 10 000 ohm
Les couleurs seront brun, noir, orange et or.
Une résistance de 50 ohms
Les couleurs seront vert, noir, noir et or.
Un clip de la batterie de 9 volts
Une batterie de 9 volts
Comment fait-elle cela?
Le cœur de l'amplificateur est le transistor. Nous aurions pu utiliser un transistor NPN plus ordinaire, comme le 2N4401, mais pour obtenir un son plus fort, nous utilisons un type spécial "deux-en-un» du transistor appelé Darlington.

Le transistor Darlington a deux transistors dans le même paquet, et peut amplifier des signaux beaucoup plus que d'un seul transistor peut.
Transistors amplifier un signal en agissant comme une résistance variable. Nous avons mis le signal à la base, et le signal contrôle la quantité de courant passe à travers le transistor de l'émetteur vers le collecteur.
Si nous mettons simplement le signal dans la base, cependant, le transistor serait éteint complètement lorsque le signal est faible, et allumer complètement lorsque le signal est élevé. Ce comportement est utile lorsque l'on veut utiliser le transistor comme un interrupteur, mais nous devons changer le comportement pour faire un bon amplificateur audio.
Lorsque le signal est à zéro, nous voulons que la sortie de l'amplificateur d'être à mi-chemin entre 0 et 9 volts (4,5 volts). Nous pouvons organiser pour que cela se produise en utilisant un diviseur de tension. Un diviseur de tension est de deux résistances, une connectée au côté positif de la batterie, et l'autre pour le côté négatif. Où ils se rencontrent dans le milieu, la tension sera divisé en deux (si les résistances sont les mêmes).
Read More »
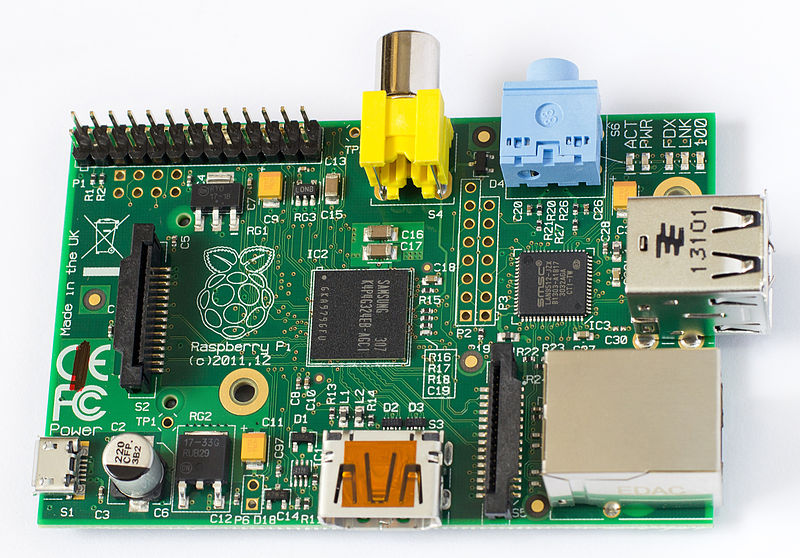
| Logo du RaspberryPi |
Cet ordinateur qui a la taille d'une carte de crédit, il permet l’exécution de plusieurs variantes du systèmes d'exploitation libre GNU/Linux et des logiciels compatibles .
Les Cartes:
Il existe 5 modèles de la carte RaspberryPi (A / A+ / B / B+ / 2)
 |
| RaspberryPi 2 |
 |
| RaspberryPi model A |
 |
| RaspberryPi Model A+ |
 |
| Raspberry model B |
 |
| Raspberry model B+ |
Caractéristiques :
| Modèle A | Modèle A+ | Modèle B | Modèle B+ | Modèle 2 | |
|---|---|---|---|---|---|
| Prix de lancement : | 25 $ US | 20 $ US | 35 $ US | ||
| SoC : | Broadcom BCM2835 (CPU, GPU, DSP, SDRAM, et 1 port USB) | Broadcom BCM2836 | |||
| CPU : | 700 MHz ARM1176JZF-S core (ARM11) | 900 MHz quadricœur ARM Cortex-A7 (jeu d'instructions ARM v7) | |||
| GPU : | Broadcom VideoCore IV, OpenGL ES 2.0, MPEG-2 et VC-1 (avec licence), 1080p 30 h.264/MPEG-4 AVC high-profile decodeur et encodeur | ||||
| Mémoire (SDRAM) : | 256 Mo (intégré avec GPU) | 512 Mo (intégré avec GPU) au 15 octobre 2012 | 1 Go | ||
| Nombre de ports USB 2.0: | 1 (directement sur BCM2835 chip) | 2 | 4 | ||
| Sorties vidéos: | Composite et HDMI | HDMI et Jack (via convertisseur Composite) | Composite et HDMI | HDMI et Jack (via convertisseur Composite) | |
| Sorties audio: | stéréo Jack 3,5 mm (sortie son 5.1 sur la prise HDMI) | stéréo Jack 3,5 mm (sortie son 5.1 sur la prise HDMI) et Composite | |||
| Unité de lecture/écriture : | SD / MMC / fente pour carte SDIO (3,3 V) | MicroSD | SD / MMC / fente pour carte SDIO (3,3 V) | MicroSD | |
| Carte/connectique réseau: | Non | 10/100 Ethernet | |||
| Périphériques : | 8 × GPIO, UART, I²C bus, SPI bus avec deux chip selects, I²S audio +3.3 V, +5 V | 17 × GPIO | 8 × GPIO, UART, I²C bus, SPI bus avec deux chip selects, I²S audio +3.3 V, +5 V | 17 × GPIO | |
| Puissance nominale : | 300 mA (1,5 W) | 200 mA (1 W) | 700 mA (3,5 W) | 600 mA (3 W) | |
| Consommation maximale mesurée : | 320 mA | 230 mA | 480 mA | 330 mA | 350 mA |
| Source d'alimentation: | 5 volt via Micro-B USB ou GPIO header | ||||
| Dimensions : | 85,60 mm × 53,98 mm × 17 mm | 65 mm × 53,98 mm × 17 mm | 85,60 mm × 53,98 mm × 17 mm | ||
| Poids : | 45 g | 23 g | 45 g | ||
| Systèmes d'exploitation : | Debian GNU/Linux, Raspbian OS, Fedora, Arch Linux ARM, RISC OS, FreeBSD, Plan 9, Kali Linux | idem modèle 1 + Snappy Ubuntu Core, Windows 10 IoT | |||
Read More »
Une diode Zener est un assemblage de deux semi-conducteurs dont les propriétés électriques ont été découvertes par le physicienaméricain Clarence Zener. Contrairement à une diode conventionnelle qui ne laisse passer le courant électrique que dans un seul sens, le sens direct, les diodes Zener sont conçues de façon à laisser également passer le courant inverse, mais ceci uniquement si la tension à ses bornes est plus élevée que le seuil de l'effet d'avalanche. Ce seuil en tension inverse (tension Zener) est de valeur déterminée pouvant aller de 1,2 V à plusieurs centaines de volts Certaines diodes Zener comportent une troisième broche qui permet de régler cet effet d'avalanche.
![]()


Read More »

On l'utilise comme référence de tension dans les alimentations stabilisées par exemple. Elle permet également la protection en surtension, toutefois ladiode Transil lui est largement supérieure en puissance absorbable.
Les diodes Zener sont fréquemment utilisées pour réguler la tension dans un circuit. Lorsqu'on la connecte en inverse en parallèle avec une source de tension variable, une diode Zener devient conductrice lorsque la tension atteint la tension d'avalanche de la diode. Elle maintient ensuite la tension à cette valeur.

Read More »
Le câble coaxial ou ligne coaxiale est une ligne de transmission ou liaison asymétrique, utilisée en hautes fréquences, composée d'un câble à deux conducteurs. L'âmecentrale, qui peut être mono-brin ou multi-brins (en cuivre ou en cuivre argenté, voire en acier cuivré), est entourée d'un matériau diélectrique (isolant). Le diélectrique est entouré d'une tresse conductrice (ou feuille d'aluminium enroulée), puis d'une gaine isolante et protectrice. Sa forme particulière permet de ne produire (et de ne capter) aucun flux net extérieur.
![]()


Read More »

Les deux conducteurs de pôles opposés d'un câble coaxial sont de natures différentes (sur une ligne bifilaire, constituée de deux conducteurs parallèles séparés par un diélectrique, ils sont indifférenciés) : l'âme, qui est le conducteur central en cuivre est entourée d'un matériau isolant, puis d'un blindage qui est le second conducteur, généralement constitué de tresses de cuivres. La caractéristique spécifique de ce type de câble est que les axes centraux de symétrie des deux conducteurs se confondent : la conséquence est qu'ils subissent les mêmes perturbations induites par les champs électromagnétiques environnants. Le blindage évite aussi que les conducteurs ne produisent des perturbations vers le milieu extérieur.
La tension, qui est le signal utile, est égale à différence de potentiel entre ces deux conducteurs. En théorie, quand les axes sont parfaitement confondus, les champs magnétiques extérieurs créent le même gain (ou la même perte) de potentiel sur les deux parties du câble. La tension induite (créée par les champs perturbateurs) est donc nulle, et le signal est transmis sans perturbation.

Read More »
Les microcontrôleurs PIC (ou PICmicro dans la terminologie du fabricant) forment une famille de microcontrôleurs de la société Microchip. Ces microcontrôleurs sont dérivés du PIC1650 développé à l'origine par la division microélectronique de General Instrument.
Le nom PIC n'est pas officiellement un acronyme, bien que la traduction en « Peripheral Interface Controller » (« contrôleur d'interface périphérique ») soit généralement admise. Cependant, à l'époque du développement du PIC1650 par General Instrument, PIC était un acronyme de « Programmable Intelligent Computer » ou « Programmable Integrated Circuit ».

Un microcontrôleur PIC est une unité de traitement et d’exécution de l'information à laquelle on a ajouté des périphériques internes permettant de réaliser des montages sans nécessiter l’ajout de composants annexes. Un microcontrôleur PIC peut donc fonctionner de façon autonome après programmation.
Les PIC intègrent une mémoire programme non volatile (FLASH), une mémoire de données volatile (SRAM), une mémoire de donnée non volatile (E2PROM), des ports d'entrée-sortie (numériques, analogiques, MLI, UART, bus I2C, Timers, SPI, etc.), et même une horloge, bien que des bases de temps externes puissent être employées. Certains modèles disposent de ports et unités de traitement de l'USB et Ethernet.

Les PIC disposent de plusieurs technologies de mémoire de programme : flash, ROM, EPROM, EEPROM, UVPROM. Certains PIC18 permettent l'accès externe à la FLASH et à la RAM.
La programmation du PIC peut se faire de différentes façons :
- par programmation in-situ en utilisant l'interface de programmation / debug universel ICSP de Microchip. Il suffit alors d'ajouter simplement un connecteur ICSP au microcontrôleur sur la carte fille pour permettre sa programmation une fois soudé ou sur son support (sans avoir besoin de le retirer). Il existe pour cela plusieurs solutions libres (logiciel + interface à faire soi-même) ou commerciales (par exemple : PICkit 3, ICD3 et Real-Ice de Microchip).
- par l'intermédiaire d'un programmateur dédié (par exemple : PM3, PICSTART pour la production de la société Microchip)

Read More »
Inscription à :
Commentaires (Atom)









